
Abschnitt 4.2 - 4.2 Schutzeinrichtungen für Roboterzellen und -anlagen
An Industrierobotern und -anlagen existiert eine Vielzahl von Gefahrstellen mit mechanischen Gefährdungen, z. B. durch Quetschen und Scheren. Um einen Eingriffs- und Zutrittsschutz sicherstellen zu können, müssen Roboteranlagen daher mit Schutzeinrichtungen umgeben sein. Eine Ausnahme bilden Arbeitsplätze mit kollaborierenden Robotern, die speziell für die Mensch-Roboter-Kooperation konzipiert sind (Abschnitt 5). In den meisten Fällen kommen Schutzzäune sowie feste Verkleidungen in Verbindung mit Lichtvorhängen, Rolltoren u. dgl. in Betracht.
Hinzu kommen Gefährdungen aufgrund des technischen Prozesses (Schweißen, Laser), welche zusätzliche Schutzeinrichtungen erfordern können, z. B. Blendschutz, Absaugung, persönliche Schutzausrüstung (PSA).
4.2.1 Trennende Schutzeinrichtungen
4.2.1.1 Sicherheitsabstände
In Bezug auf Sicherheitsabstände verweist EN ISO 10218-2 auf EN ISO 13857. Als Schutz gegen Überklettern beträgt die Mindesthöhe von trennenden Schutzeinrichtungen danach 1400 mm, wenn Gefahrstellen beim Übergreifen nicht erreicht werden können. Für Einlegeplätze kann aus ergonomischen Gründen eine geringere Höhe gewählt werden (siehe Abschnitt 4.2.1.4). Der Abstand der Unterkante der trennenden Schutzeinrichtungen zum Boden darf maximal 180 mm betragen (Unterkriechschutz).
Wenn Gefahrstellen beim Übergreifen erreichbar sind müssen die Sicherheitsabstände nach EN ISO 13857 bestimmt werden (Abbildung 36). Tabelle 4 zeigt die Sicherheitsabstände für die bei Robotern in der Regel anzunehmenden "hohen" Risiken, z. B. Quetschen, Scheren. Tabelle 5 für "geringe" Risiken kommt für Roboteranlagen nur selten in Betracht, z. B. bei Berühren oder Anstoßen.
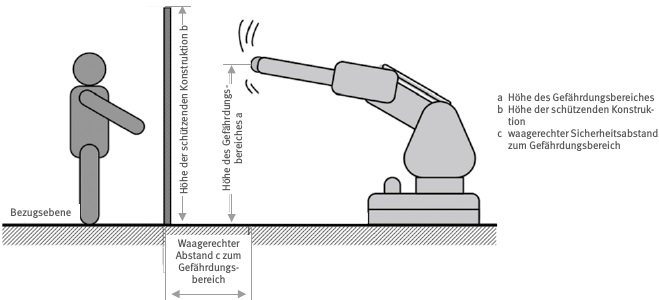
| Höhe des Gefährdungsbereiches a | Höhe der schützenden Konstruktion b | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1000 | 1200 | 1400 | 1600 | 1800 | 2000 | 2200 | 2400 | 2500 | 2700 | |
| 2700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2600 | 900 | 800 | 700 | 600 | 600 | 500 | 400 | 300 | 100 | 0 |
| 2400 | 1100 | 1000 | 900 | 800 | 700 | 600 | 400 | 300 | 100 | 0 |
| 2200 | 1300 | 1200 | 1000 | 900 | 800 | 600 | 400 | 300 | 0 | 0 |
| 2000 | 1400 | 1300 | 1100 | 900 | 800 | 600 | 400 | 0 | 0 | 0 |
| 1800 | 1500 | 1400 | 1100 | 900 | 800 | 600 | 0 | 0 | 0 | 0 |
| 1600 | 1500 | 1400 | 1100 | 900 | 800 | 500 | 0 | 0 | 0 | 0 |
| 1400 | 1500 | 1400 | 1100 | 900 | 800 | 0 | 0 | 0 | 0 | 0 |
| 1200 | 1500 | 1400 | 1100 | 900 | 700 | 0 | 0 | 0 | 0 | 0 |
| 1000 | 1500 | 1400 | 1000 | 800 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1500 | 1300 | 900 | 600 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1400 | 1300 | 800 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 1400 | 1200 | 400 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 1200 | 900 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 1100 | 500 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Tab. 4 Sicherheitsabstände c hinsichtlich Übergreifen nach EN ISO 13857 für hohes Risiko [10]
| Höhe des Gefährdungsbereiches a | Höhe der schützenden Konstruktion b | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1000 | 1200 | 1400 | 1600 | 1800 | 2000 | 2200 | 2400 | 2500 | 2700 | |
| 2500 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2400 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 0 | 0 |
| 2200 | 600 | 600 | 500 | 500 | 400 | 350 | 250 | 0 | 0 | 0 |
| 2000 | 1100 | 900 | 700 | 600 | 500 | 350 | 0 | 0 | 0 | 0 |
| 1800 | 1100 | 1000 | 900 | 900 | 600 | 0 | 0 | 0 | 0 | 0 |
| 1600 | 1300 | 1000 | 900 | 900 | 500 | 0 | 0 | 0 | 0 | 0 |
| 1400 | 1300 | 1000 | 900 | 800 | 100 | 0 | 0 | 0 | 0 | 0 |
| 1200 | 1400 | 1000 | 900 | 500 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1000 | 1000 | 1000 | 900 | 300 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1300 | 900 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1200 | 500 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 1200 | 300 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 1100 | 200 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 1100 | 200 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Tab. 5 Sicherheitsabstände c hinsichtlich Übergreifen nach EN ISO 13857 für niedriges Risiko [10]
4.2.1.2 Feststehende trennende Schutzeinrichtungen
Feststehende trennende Schutzeinrichtungen sind unlösbar mit der Maschine oder mit der Umgebung zu verbinden (Verschweißen, Vernieten etc.) oder sie dürfen nur durch die Benutzung von Werkzeug zu entfernen oder zu öffnen sein. Bei Anlagen, die erstmalig ab dem 29.12.2009 in Verkehr gebracht wurden, müssen zusätzlich sogenannte unlösbare Befestigungsmittel vorgesehen werden. Dabei müssen die Befestigungsmittel nach dem Abnehmen der Schutzeinrichtungen mit den Schutzeinrichtungen oder mit der Maschine verbunden bleiben. Dies gilt aber nur dann, wenn vorhersehbar ist, dass z. B. bestimmte Zaunfelder oder Abdeckungen für regelmäßige Reinigungs- oder Wartungsarbeiten entfernt werden müssen. Bei Anlagen mit einer ausreichenden Zahl von Zugangstüren kann davon ausgegangen werden, dass Reinigungspunkte durch die Schutztüren erreichbar sind.
Professionelle Anbieter von Maschinenschutzzäunen bieten meistens von vornherein Zaunsysteme an, die die o. g. Kriterien erfüllen (Abbildung 37).
Die Rückhaltefähigkeit von trennenden Schutzeinrichtungen gegen mechanische Einwirkungen ist nicht generell festgelegt. Wenn damit zu rechnen ist, dass herausgeschleuderte Teile, z. B. Bruchstücke von Bearbeitungswerkzeugen, die trennenden Schutzeinrichtungen durchschlagen oder unzulässig deformieren, müssen im Rahmen der Risikobeurteilung Vorkehrungen getroffen werden.
Für Dreh-, Fräs- und Bohrbearbeitungen enthalten die entsprechenden Europäischen Normen Tabellenwerte zur Auslegung von trennenden Schutzeinrichtungen für die Materialien Stahl und Polycarbonat. Die Dimensionierung der trennenden Schutzeinrichtungen gegen andere mechanische Einwirkungen ist entsprechend durch Berechnung oder Versuch auszulegen.

Trennende Schutzeinrichtungen sollten unabhängig von Zusatzanforderungen eine gewisse Grundstabilität aufweisen. Eine fallende oder sich abstützende Person sollte von der Schutzeinrichtung sicher gehalten werden.
4.2.1.3 Eingeschränkter Bewegungsraum
Ein eingeschränkter Raum (siehe auch Abschnitt 4.1.10) ist mindestens dort einzurichten, wo sich häufig Personen aufhalten. Dabei sind Personen auch außerhalb der Umzäunung durch zusätzliche Schutzmaßnahmen vor fehlerhaften Verfahrbewegungen des Roboters zu schützen. Diese Maßnahmen müssen entsprechend den örtlichen Gegebenheiten und dem zu mindernden Risiko ausgewählt werden. Geeignet sind:
Ein ausreichender Abstand des Roboters zur Umzäunung
Mechanische Anschläge (Puffer)
Eine ausreichende Festigkeit der Umzäunung
Eine sicher überwachte Robotersteuerung
Sichere kontaktbehaftete oder sichere elektronische Achsnocken
Innen angeordnete Lichtschranken bzw. -vorhänge.
Nach EN ISO 10218-2 dürfen die äußeren Schutzeinrichtungen nicht näher an der Gefährdung installiert werden als der eingeschränkte Raum, es sei denn, dass entweder die äußeren Schutzeinrichtungen als Begrenzungseinrichtung nach EN ISO 10218-2, 5.4.3 konstruiert sind oder die Risikobeurteilung ergibt, dass andere technische Schutzmaßnahmen geeignet sind.
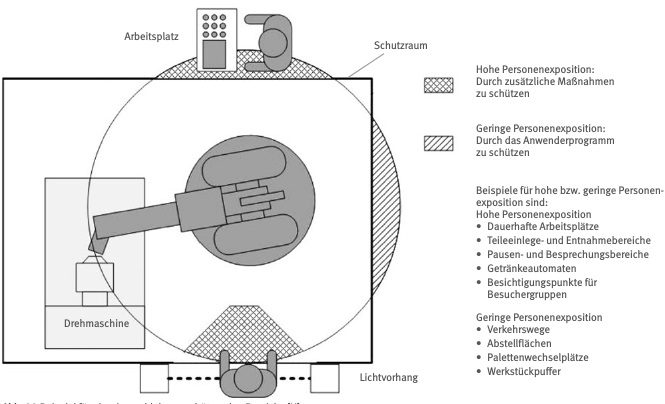
Die folgende Unterscheidung in geringe und hohe Personenexposition gibt Hinweise zur Ausführung einer solchen Risikobeurteilung.
In Betrieben der Automobil- bzw. Automobilzulieferindustrie werden derzeit für eine hohe Personenexposition im Rahmen der Risikobeurteilung des Anlagenherstellers in Zusammenarbeit mit dem Betreiber als Richtwert mehr als 1-2 Stunden/Tag angegeben. Wenn diese Zeit unterschritten wird, kann von einer geringen Aufenthaltsdauer gesprochen werden.
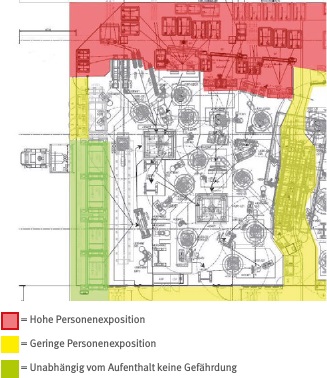
Die sichere Einschränkung des Bewegungsraums wird bei Neuanlagen zunehmend mittels sicher überwachter Robotersteuerung realisiert (4.1.4). Im Rahmen der Risikobeurteilung sollte der Anlagenhersteller gemeinsam mit dem zukünftigen Betreiber ein Sicherheits-Anlagenlayout definieren. Darin sind die Bereiche zu kennzeichnen, welche mit sicher überwachter Robotersteuerung oder gleichwertigen Maßnahmen zu schützen sind (Abbildung 39).
Bei Nachrüstung von bestehenden Anlagen kommen i. d. R. kontaktbehaftete oder elektronische Achsnocken zur Anwendung. Mechanische Festanschläge sind zwar einfach zu montieren, schränken aber den Bewegungsbereich meist soweit ein, dass auch die Produktion der Anlage dadurch behindert wird.
Bei der Positionierung der Nocken und Schalteinrichtungen ist der Nachlauf des Roboters zu berücksichtigen, d. h. das Schaltsignal zum Stillsetzen der Achsen muss bereits vor Einfahren in den Gefahrbereich erfolgen. Geringe Verformungen der Schutzzäune im Fehlerfall können in Kauf genommen werden, vorausgesetzt, dass keine Teile oder Bruchstücke gefährlich wegfliegen können.
Kommt an der Anlage die Betriebsart "manuell hohe Geschwindigkeit" (T2) zum Einsatz, muss ein sicherer Standort mit einem Freiraum von mind. 500 mm zwischen dem berechneten Haltepunkt der Gefährdung und z. B. Gebäuden, Aufbauten, äußeren Schutzeinrichtungen, Versorgungseinrichtungen oder anderen Maschinen eingehalten werden. Wird dieser Sicherheitsabstand mittels steuerungstechnischer Maßnahmen realisiert, bilden diese Maßnahmen eine Sicherheitsfunktion nach EN ISO 13849-1 und müssen PLd Kategorie 3 erfüllen (Abschnitt 4.3). Der bei der Risikobewertung ermittelte Standort des Einrichters während der Betriebsart T2 muss in der Betriebsanleitung angegeben werden.
4.2.1.4 Stationen zum manuellen Be- und Entladen
Für Schutzeinrichtungen an Stationen zum manuellen Be- oder Entladen gelten zunächst die gleichen Anforderungen wie auch für sonstige Schutzeinrichtungen: Der Zugang zum Gefahrenbereich muss primär durch technische Maßnahmen gesichert sein. Ebenso dürfen die Bedienpersonen keinen Gefährdungen durch den Prozess ausgesetzt sein, z. B. durch herausfliegende Teile, Schweißfunken etc.
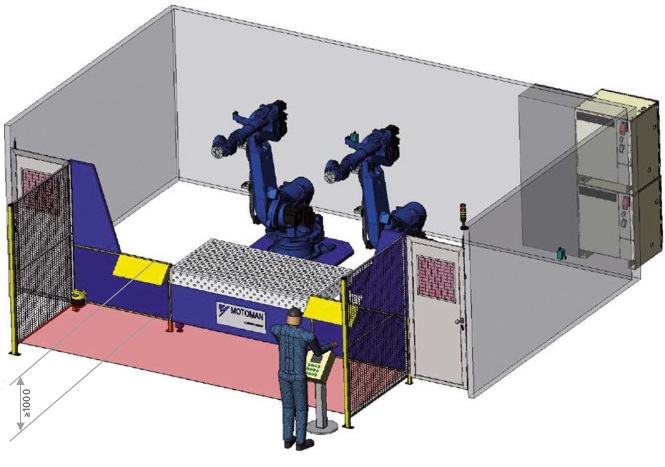
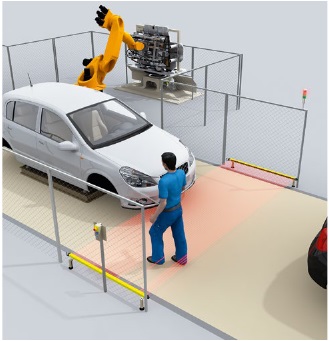
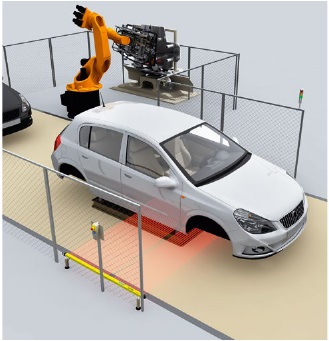
Bei manuellen Be- und Entladestationen mit wechselseitigem Zugriff durch Roboter und Bediener (z. B. Spannstationen) sind nach EN ISO 10218-2 keine weiteren Schutzeinrichtungen erforderlich, wenn die Barriere zwischen Mensch und Roboter mindestens 1400 mm hoch ist. Diese Barriere wirkt dabei nur als Schutz gegen Durchstieg in den Gefahrbereich der Anlage. Die vom Bediener unmittelbar erreichbaren gefahrbringenden Bewegungen an der Station (z. B. Spanner, Roboterarm, Werkzeug) müssen davon unabhängig immer abgesichert werden, z. B. durch Laserscanner (Abbildung 40).
Aus ergonomischen Gründen ist die o. g. Barrierehöhe von 1400 mm Höhe meistens nicht akzeptabel. In einer Anmerkung bietet EN ISO 10218-2 deshalb an, dass auch Höhen zwischen 1400 und 1000 mm vertretbar sind, je nach Schutzwirkung durch die Form der Barriere und die Ergebnisse der Risikobeurteilung.
Der für Industrieroboter zuständige Normenausschuss Maschinenbau (NAM) des DIN hat hierüber mehrmals beraten und ein Maß von mind. 1000 mm als nach dem Stand der Technik für ausreichend befunden, vorausgesetzt, dass dies durch die Risikobewertung ermittelt wurde. Dies deckt sich mit den Anforderungen in EN ISO 11161.
Bei Barrierehöhen von weniger als 1000 mm müssen weitere Schutzmaßnahmen vorgesehen werden. Geeignet sind z. B. optische Schutzeinrichtungen, die das Eindringen einer Person in den Gefahrbereich der Anlage erkennen und die gefahrbringenden Bewegungen stillsetzen.
Aufgrund der Form der Werkzeuge und Bauteile kommt es vor, dass die Barriere nicht durchgängig eine bestimmte Höhe hat. Die Barrierehöhe sollte dabei, wenn ergonomisch möglich, größer 1000 mm sein. Es können sich jedoch z. B. aufgrund der Teilegeometrie auch Aussparungen ergeben, die 1000 mm unterschreiten. Anhand der Risikobeurteilung ist zu bewerten, ob dadurch ein erhöhtes Risiko entsteht. Insbesondere ist zu prüfen, ob diese aufgrund der Größe und Geometrie als Aufstieg benutzt werden können.
Neben dem Vorsehen der o. g. technischen Schutzmaßnahmen gelten die Anforderungen an die Betriebsanleitung des Herstellers sowie die daraus abzuleitenden Unterweisungen durch den Betreiber der Anlage.
4.2.2 Bewegliche trennende Schutzeinrichtungen
Bewegliche trennende Schutzeinrichtungen müssen mit den gefahrbringenden Bewegungen verriegelt sein. Das heißt, die gefahrbringenden Bewegungen müssen angehalten werden, sobald eine Schutzeinrichtung geöffnet wird. Die gefahrbringenden Bewegungen müssen zum Stillstand kommen, bevor sie von Personen erreicht werden können. Dabei wird entsprechend EN ISO 13855 eine Schreit-/Greifgeschwindigkeit von 1,6 m/s zugrunde gelegt.
Die Steuerungen von Verriegelungen müssen in sicherer Technik ausgeführt sein (Abschnitt 4.1.3).
4.2.2.1 Schutztüren
Schutztüren müssen dort vorgesehen werden, wo der Zugang von Personen zur Anlage erforderlich ist. Bei größeren Anlagen sind in der Regel mehrere Schutztüren vorzusehen, um das Risiko des Umgehens von Schutzeinrichtungen zu minimieren.
Wenn das Risiko besteht, dass Personen in der Anlage eingeschlossen werden und sich nicht selbst befreien können, müssen Schutztüren von innen zu öffnen sein (Fluchtentriegelung, Abbildung 41).
Türzuhaltungen müssen vorgesehen werden, wenn Gefahrstellen erreicht werden können, bevor die gefährlichen Maschinenfunktionen zum Stillstand gekommen sind. Türzuhaltungen dürfen von der Maschinensteuerung erst dann zum Öffnen freigegeben werden, wenn die Gefahrstellen unter Berücksichtigung der Zutrittsgeschwindigkeit nicht mehr erreicht werden können. Die Freigabe darf zeitgesteuert oder in Abhängigkeit von einem Prozesssignal erfolgen, z. B. Drehzahl-Null-Signal. In der Regel wird über die Türzuhaltungen auch ein Schutz des Produktionsprozesses erzielt. Dabei erfolgt die Freigabe erst dann, wenn der Prozessablauf dies zulässt.
Türzuhaltungen sind nicht verpflichtend. Die Notwendigkeit ergibt sich aus o. g. Überlegungen.
Bei elektromagnetischen Türzuhaltungen existieren zwei unterschiedliche Systeme (Typen):
Spannungslos öffnend: Bei einem Ausfall der elektrischen Energie wird die Türzuhaltung aufgehoben. Nicht zu empfehlen, wenn mit häufigen Spannungsausfällen bei gleichzeitig lange nachlaufenden gefahrbringenden Bewegungen zu rechnen ist.
Spannungslos zuhaltend: Die Türzuhaltung wird durch Anlegen eines Schaltsignals aufgehoben. Bei Spannungsausfall bleibt die Zuhaltung erhalten. Nachteil: Bei Ausfall der Netzversorgung ist ein Zugang nur mit Hilfe einer Notentsperrung möglich.
Eine Auswahl der o. g. Typen von Türzuhaltungen erfolgt entsprechend der Risikobeurteilung des Maschinenherstellers. Eine generelle Bevorzugung eines bestimmten Typs existiert nicht. Das elektrische Signal, welches die Zuhaltung aktiviert bzw. deaktiviert, ist in der Regel nicht sicherheitsgerichtet, da die Überwachungskontakte der Schutztür auch bei fehlerhaftem Zuhaltesignal wirksam sind.

4.2.2.2 Rolltore
Rolltore haben gegenüber berührungslos wirkenden Schutzeinrichtungen den Vorteil, dass sie sich in nur geringem Abstand zu den Gefahrstellen befinden müssen, da ein Sicherheitsabstand wie bei Lichtschranken aufgrund der Hand-Arm-Geschwindigkeit nicht beachtet werden muss. Dies kann bei Einlegeplätzen und Spannstationen von Vorteil sein, da lange Wegstrecken für die Beschäftigten vermieden werden. Rolltore müssen eine ausreichende Stabilität haben, um Kräfte durch Fallen oder Abstützen der Bedienperson aufnehmen zu können. Sofern der Bewegungsbereich des Roboters in das Rolltor reicht, ist der Roboter gegen Verfahren in diesen Bereich gesondert abzusichern, wenn mit einem häufigen Aufenthalt der Bedienperson am Rolltor zu rechnen ist (siehe auch Abschnitt 4.2.1.3). Wenn das nicht möglich ist, muss der Abstand ausreichend gestaltet werden.
Zu beachten ist bei Rolltoren die Absicherung der Schließkanten. Entsprechend EN 12453 dürfen die statischen Kräfte, die beim Einklemmen von Armen und Händen zwischen Schließkante und Gegenschließkante auftreten, nicht größer sein als 150 N. Kurzzeitig (max. 0,75 s) dürfen bis zu 400 N auftreten. Treten größere Kräfte auf, müssen Schaltleisten verwendet werden, die bei Auftreffen auf ein Hindernis die Bewegung des Rolltores sicher unterbrechen. Aber auch bei Verwendung von Schaltleisten dürfen die genannten Maximalkräfte an den Schließkanten nicht überschritten werden. Außerdem wird eine großflächige Kontaktierung vorausgesetzt, d. h. keine scharfen Kanten.
Da als Material für Rolltore oft Kunststoff verwendet wird, ist die Widerstandsfähigkeit gegenüber prozessbedingten Beanspruchungen, z. B. beim Schweißen, sicherzustellen.
4.2.2.3 Umgehen auf einfache Weise (Manipulation)
Die Schutzeinrichtungen und die Verriegelungen müssen so gestaltet sein, dass sie nicht auf einfache Weise manipuliert, also umgangen werden können. Das Umgehen auf einfache Weise muss bereits durch die Konstruktion der Maschine verhindert sein. Nach EN ISO 14119 kann ein typisches "Umgehen auf eine vernünftigerweise vorhersehbare Art" ein absichtlicher Versuch sein, eine Verriegelungseinrichtung entweder von Hand oder durch Benutzung eines leicht verfügbaren Gegenstandes zu umgehen.
Wenn im Rahmen der Risikobeurteilung bereits bei der Konstruktion der Maschine eine Motivation zum


Umgehen von Schutzeinrichtungen erkennbar wird, z. B. durch unzureichende Bedienbarkeit, muss nach EN ISO 14119 der Schutz gegen Umgehen erhöht werden. Die Verwendung eines separaten Betätigungsorgans (Zunge) durch den Benutzer muss dann z. B. durch einen verdeckten Einbau erschwert werden.
Es ist aber sinnvoller, die Bedienbarkeit der Maschine von vornherein so zu gestalten, dass ein Anlass zum Umgehen von Schutzeinrichtungen vermieden wird.
4.2.3 Berührungslos wirkende Schutzeinrichtungen (BWS)
Zu den berührungslos wirkenden Schutzeinrichtungen zählen Lichtschranken und -vorhänge, Laserscanner, Kamerasysteme, Passiv-Infrarotsysteme, Ultraschallsysteme usw. Im Roboterbereich kommen hauptsächlich Lichtgitter und Lichtvorhänge sowie Laserscanner zur Anwendung. Nach EN ISO 10218-2 müssen die Sicherheitsabstände für berührungslos wirkende Schutzeinrichtungen entsprechend EN ISO 13855 ausgelegt werden.
Aufgrund des nicht zu vermeidenden Nachlaufens der Roboterachsen oder der Vorrichtungen beim Eintreten in den Gefahrenbereich ist entsprechend EN ISO 13855 ein Sicherheitsabstand vorzusehen. Bei einem senkrecht angeordneten Lichtvorhang bestimmt das Detektionsvermögen (Auflösung bzw. Abstand der Lichtstrahlen untereinander) den notwendigen Sicherheitsabstand zur Gefahrstelle. Aufgrund des Nachlaufens der gefahrbringenden Bewegungen muss bei einem Lichtvorhang mit geringer Auflösung der Abstand des Lichtvorhanges zur Gefahrstelle größer sein als bei einem Lichtvorhang mit hoher Auflösung. Der Nachlauf kann durch Rechnung oder Versuch ermittelt werden.
4.2.4 Hintertretbare Schutzeinrichtungen, Quittierung
Roboteranlagen sind meistens begehbar. Es müssen Maßnahmen vorgesehen werden, die einen Anlauf von gefährlichen Bewegungen verhindern, solange sich Personen im Gefahrenraum aufhalten. Dies gilt für Zugänge durch berührungslos wirkende Schutzeinrichtungen (z. B. Lichtvorhänge) und bewegliche trennende Schutzeinrichtungen (z. B. Schutztüren) gleichermaßen. Es können zwei Fälle unterschieden werden:
Gefahrenraum einsehbar:
Wenn die Bedienperson den Arbeitsraum einsehen kann, ist ein Quittiertaster ausreichend, um die Signale von Schutzeinrichtungen wie Schutztüren und Lichtvorhängen zurückzusetzen und den Start der gefährlichen Bewegungen freizugeben (Abbildung 44). Für Quittiertaster gilt allgemein:
Ein Quittiertaster muss an einem Ort außerhalb der Schutzeinrichtungen angebracht sein.
Er darf von innen nicht erreichbar sein.
Vom Ort des Quittiertasters muss ein guter Blick auf die gefährlichen Bewegungen gegeben sein.
Die Signalauswertung muss sicherstellen, dass Tastenklemmer oder bewusstes Festsetzen der Taster erkannt werden, z. B. durch Flankenauswertung.
Die Betriebsanleitung der Anlage muss darüber informieren, dass die Person, die den Quittiertaster betätigt, sich davon überzeugen muss, dass sich keine Personen mehr im Gefahrenraum aufhalten.

Wenn Hindernisse den Blick versperren sind ggf. mehrere nacheinander zu betätigende Quittiertaster erforderlich oder es müssen Sichtfenster vorgesehen werden, um die Einsehbarkeit des Gefahrenraumes bei Quittierung zu ermöglichen, z. B. bei Roboter-Schweißanlagen (Abbildung 45).
Gefahrenraum nicht einsehbar:
Für diesen Fall ist die Anwendung von Quittiertastern als alleinige Maßnahme nicht ausreichend, da sich Personen im Arbeitsraum aufhalten können. Sie werden vom Betätigungsort aus möglicherweise nicht gesehen, da sie verdeckt sind, z. B. durch Vorrichtungen. In diesen Bereichen kann durch den Einbau konstruktiver Elemente der Aufenthalt von Personen verhindert werden, z. B. durch schräg gestellte Bleche (Stehverhinderung). Außerdem kann durch Spiegel die Einsehbarkeit verbessert werden. Des Weiteren können partiell personenerkennende Schutzeinrichtungen vorgesehen werden, z. B. liegende Lichtvorhänge, Scanner, Schaltmatten, Schaltplatten.
Bei größeren weiträumigen Anlagen ist aufgrund der konstruktiven Hindernisse eine vollständige Erkennung durch derartige Einrichtungen technisch und wirtschaftlich nicht mehr durchführbar, z. B. im Automobilkarosseriebau. Dann sind mindestens an den einzelnen Zugangstüren, von denen aus ein größtmöglicher Einblick in die Anlage gegeben ist, Quittiertaster anzubringen. Zusätzlich müssen nach EN ISO 10218-2 weitere Schutzmaßnahmen vorgesehen werden, z. B. Anlaufwarnungen und sogenanntes Lock-Out. Akustische und optische Anlaufwarnungen sind jedoch nicht zu empfehlen, da sie von den Beschäftigten als störend empfunden werden. Früher oder später werden sie dann nicht mehr wahrgenommen, demontiert oder unwirksam gemacht. Im Automobilbau hat sich das sogenannte Lock-Out bewährt. Dabei werden an den Zugängen Sicherheitstürschalter vorgesehen, welche die Möglichkeit zum Einhängen von Schlössern (Lock Out) oder gleichwertigen personengebundenen Sicherungseinrichtungen bieten (Abbildung 46).
4.2.5 Nicht hintertretbare Schutzeinrichtungen
Wenn der Arbeitsraum hinreichend klein ist, sodass ein unbemerkter Aufenthalt von Personen darin ausgeschlossen werden kann, darf auf Quittiereinrichtungen verzichtet werden (siehe auch EN 692). Der jeweils folgende Arbeitszyklus kann dann unmittelbar nach Schließen der Schutztürkontakte oder Freiwerden der BWS eingeleitet werden. Die Größe des Gefahren- bzw. Arbeitsraums sollte die Maße wie bei Pressen nicht überschreiten:
Arbeitsraumhöhe: Max. 600 mm
Arbeitsraumtiefe: Max. 1000 mm
Eventuelle Lücken zwischen BWS und Gefahrenraum (z. B. Tisch) dürfen nicht breiter als 75 mm sein, damit sich keine Person in diesem Zwischenraum aufhalten kann. Wenn der Gefahrenraum die o. g. Maße überschreitet, kann auf eine Quittiereinrichtung nicht verzichtet werden, außer wenn der Arbeitsraum z. B. durch Laserscanner vollständig überwacht wird.
4.2.6 Zweihandschaltungen
Spannvorgänge müssen im Allgemeinen bei geöffneter Schutzeinrichtung ausgelöst werden, da der einwandfreie Sitz des zu spannenden Teils in der Vorrichtung durch den Bediener kontrolliert werden muss. Da alle gefahrbringenden Bewegungen durch die elektrische Verriegelung der Schutzeinrichtung sicher abgeschaltet sein müssen, ist eine zusätzliche Schalteinrichtung erforderlich, die die Spannbefehle wirksam werden lässt.
Wenn die Spannhübe größer als 4 mm und aufgrund der Spannkräfte Verletzungen zu erwarten sind, müssen Maßnahmen für den Hand- bzw. Fingerschutz vorgesehen werden, z. B. Zweihandschaltungen. Entsprechend der Risikobeurteilung des Herstellers können Zweihandschaltungen vom Typ I, II oder III nach EN 547 (zukünftig EN ISO 13851) eingesetzt werden. Zweihandschaltungen vom Typ III bieten die höchste Sicherheit. Zu beachten ist, dass die Schaltbefehle der Zweihandschaltung sicher in der Steuerung der Anlage verarbeitet werden. Die Verarbeitung der Signale allein über die Funktions-SPS oder über Standardbussysteme ist nicht ausreichend.
Für den Abstand der Zweihandschaltung vom Gefahrbereich ist der Nachlauf der gefahrbringenden Bewegung maßgebend. Nach EN ISO 13855 ist von einer Greifgeschwindigkeit von 2 m/s auszugehen.
4.2.7 Ersatzmaßnahmen bei defekten Schutzeinrichtungen
Wie Produktionseinrichtungen an Maschinen unterliegen auch Schutzeinrichtungen normalem Verschleiß. Je nach Umgebungseinflüssen muss auch mit dem Ausfall von Schutzeinrichtungen gerechnet werden. Die Anforderungen insbesondere an die sicherheitsrelevante Steuerungstechnik von Roboteranlagen bedingen in den allermeisten Fällen einen "Ausfall zur sicheren Seite". Bei Ausfall von elektronischen oder elektromechanischen Komponenten des Schutzsystems führt dies nicht zu einer gefährlichen Situation, sondern zum Maschinenstillstand.
Der zukünftige Betreiber der Anlage sollte sich rechtzeitig mit dem Lieferanten über mögliche Lösungen abstimmen. Wenn der Ausfall von Schutzeinrichtungen - und somit ein Maschinenstillstand - aus wirtschaftlichen Erwägungen nicht zu verkraften ist, müssen bereits bei der Konstruktion Vorsorgemaßnahmen getroffen werden. In der betrieblichen Praxis haben sich je nach Gefährdung und Dringlichkeit der Instandsetzungsmaßnahme folgende Vorgehensweisen bewährt:
Vorsorglicher Einbau redundanter Schutzeinrichtungen: z. B. werden durch mechanischen Verschleiß häufiger ausfallende Rolltore mit optischen Schutzsystemen kombiniert. Bei Ausfall des Rolltores wird z. B. ein Lichtvorhang aktiv. Dies bringt in der Regel einen größeren Sicherheitsabstand mit sich, was aber zeitweise zu verkraften ist.
Ersatzteilhaltung kritischer Schutzeinrichtungen und Komponenten: z. B. Türverriegelungsschalter, Lichtvorhänge, Laserscanner.
Zeitweiser Austausch komplexer Schutzeinrichtungen durch einfachere Schutzeinrichtungen: z. B. sind Laserscanner wegen der fehlenden Programmierung nicht sofort einsatzbereit. Hierzu können universelle Lichtvorhänge vertikal oder horizontal ersatzweise eingebaut werden. Nicht vollständig ausgeformte Schutzfelder können zeitweise durch Unterweisung der Beschäftigten ausgeglichen werden.
Keinesfalls dürfen Schutzeinrichtungen ohne Ersatzmaßnahmen außer Kraft gesetzt werden!