
Abschnitt 5 - 5 Bauformen und Antriebsarten von Multikoptern
Multikopter erzeugen den Auftrieb durch in einer Ebene angeordnete, senkrecht nach unten wirkende Rotoren (Propeller).
Entsprechend der Anzahl der Rotoren unterscheidet man beispielsweise zwischen:
Trikopter (mit drei Rotoren),
Quad- bzw. Quadrokopter (mit vier Rotoren),
Hexakopter (mit sechs Rotoren) und
Octokopter (mit acht Rotoren).
Einfluss der Anzahl der Rotoren
Grundsätzlich gilt:
Mit steigender Anzahl der Rotoren erhöht sich die Flugsicherheit, da beim Ausfall eines Rotors auch die Anzahl der verbleibenden Rotoren steigt und der Multikopter noch sicher fliegen kann (Vorteil der Redundanz).
Eine größere Anzahl von Rotoren steigert den Auftrieb und die Schubkraft des Multikopters, was einen Aufstieg mit höheren Lasten ermöglicht.
Weitere unterschiedliche Bauformen ergeben sich aus der Anordnung der Rotoren zur Flugrichtung beim Geradeausflug des Multikopters. Meist sind Multikopter in der " -Bauform", "H-Bauform" oder "X-Bauform" aufgebaut.
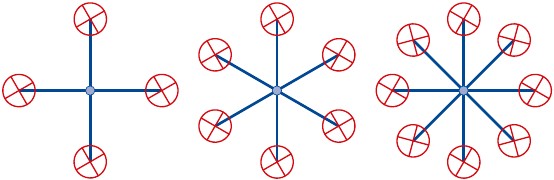
Abb. 6
Bauformen entsprechend Anzahl der Rotoren: Quadkopter, Hexakopter, Octokopter
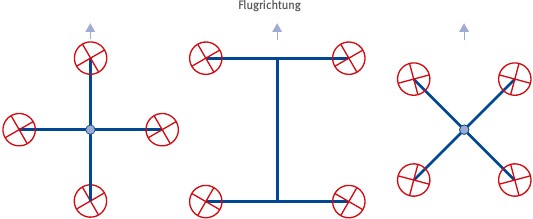
Abb. 7
Bauformen entsprechend Anordnung der Rotoren: " -Bauform", "H-Bauform", "X-Bauform"

Abb. 8
Quadkopter in X- Bauform

Abb. 9
Hexakopter
Neben den rein elektrisch betriebenen Systemen können auch andere Antriebsarten (z. B. Verbrennungsmotoren) verwendet werden. Die damit verbundenen Gefährdungen sind nicht Bestandteil dieser DGUV Information und damit separat zu betrachten.