
Abschnitt 5.5 - 5.5 Sicherheitsgerichteter Stopp
Beim sicherheitsgerichteten Stopp handelt es sich um einen Sonderfall der Geschwindigkeits- und Abstandsüberwachung. Bei Zutritt zum Kollaborationsraum werden die Antriebe sofort gestoppt und in einen sicheren Betriebshalt nach EN 61800-5-2 überführt (Safe Operating Stop/SOS). Bei Verlassen des Kollaborationsraums setzt der Roboter seine Bewegung ohne Quittierung fort. Die Höhe der Geschwindigkeit wird nach Risikobeurteilung festgelegt.
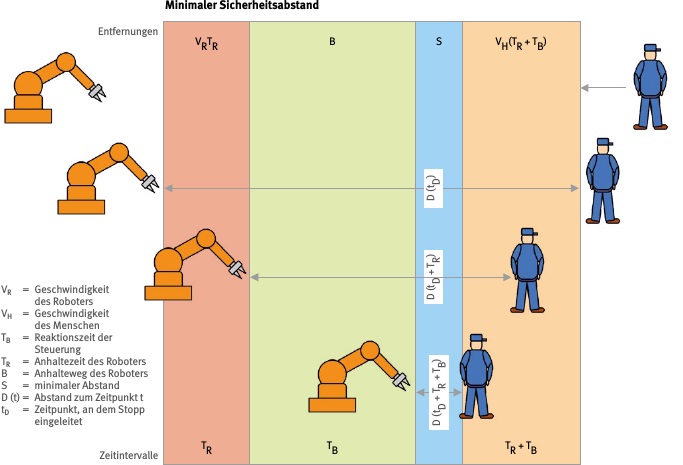
Abb. 54 Geschwindigkeits- und Abstandsüberwachung - Annäherung Roboter / Person [D]