
Abschnitt 1.1 - 1 Einführung
1.1 Robotertypen
Roboterkinematik
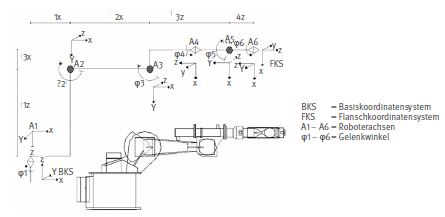
Der mechanische Aufbau eines Industrieroboters besteht aus einer räumlichen Anordnung von Bewegungsachsen. Die Achsen 1 - 3 werden als Haupt-, die Achsen 4 - 6 als Neben- oder Handachsen bezeichnet. In Abhängigkeit von der ausführbaren Achsbewegung (translatorisch, rotatorisch) unterscheidet man verschiedene Robotertypen.
Anordnung der Hauptachsen
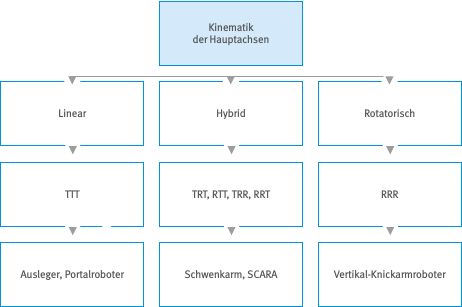
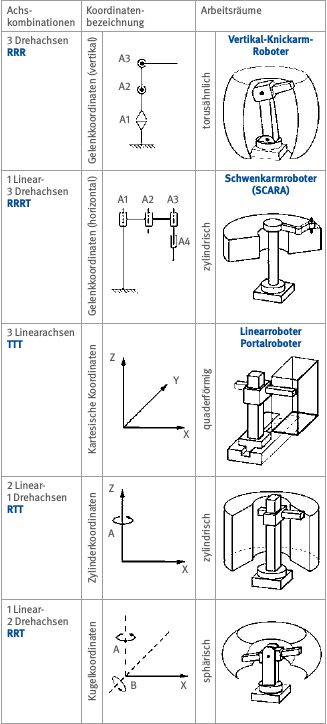
Roboter unterscheiden sich hauptsächlich durch die Art der Kinematik der Hauptachsen.
Unterschieden wird hier zwischen Achsen mit translatorischer Bewegung (T) und Achsen mit rotatorischer Bewegung (R).
Serielle Kinematiken
Serielle Kinematiken bestehen aus einer Anzahl von Armgliedern, die mit Gelenken verbunden sind. Das letzte Gelenk trägt das Werkzeug.
In der Roboterhand sind weitere Bewegungsachsen zur Positionierung und Orientierung des Werkzeuges/Greifers angeordnet.
Vertikal-Knickarmroboter
Der gebräuchlichste Vertreter der seriellen Kinematiken ist der Knickarmroboter. Ein klassischer Knickarmroboter hat drei rotatorische Grundachsen und mindestens eine, meistens aber drei rotatorische Handachsen. Die Vorteile dieser Kinematik liegen im geringen Platzbedarf und in den universellen Einsatzmöglichkeiten (Abbildung 4).

Durch Montage zweier Knickarmroboter auf einer gemeinsamen Säule erweitert sich die Universalität nochmals (Abbildung 5).

Der Begriff "Scara-Roboter" steht für "Selective Compliance Assembly Robot Arm". Diese Roboter haben meist vier Achsen; die erste, zweite und vierte Achse sind rotatorisch, die dritte Achse ist translatorisch. Dieser Robotertyp ist aufgrund seiner Kinematik zu sehr schnellen Bewegungen fähig und wird vor allem für Pick-and-Place-Anwendungen eingesetzt (Abbildung 6).

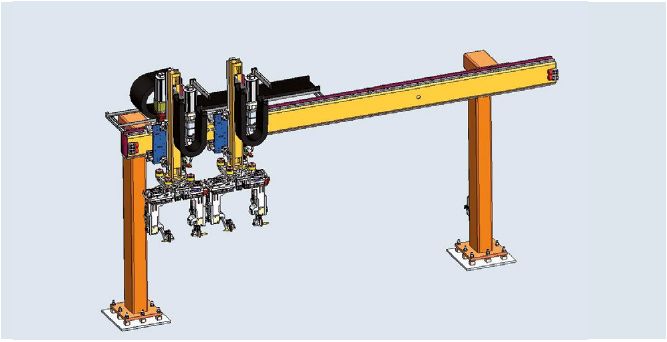
Portalroboter werden u. a. zur Automatisierung von Werkzeug- oder Spritzgussmaschinen verwendet. Durch die Be- und Entladung von oben wird die freie Zugänglichkeit zur Maschine für Wartungs- und Rüstarbeiten gewährleistet.
Portalroboter gibt es in vielen Varianten. Die gebräuchlichste Ausführung ist das Linienportal, das aus einer horizontalen und einer vertikalen Linearachse besteht, an die entweder direkt ein Greifer oder dazwischen noch zusätzliche rotatorische Handachsen angebaut sind.
Flächenportale haben noch eine zweite Horizontalachse. Dadurch erhält man große Arbeitsräume (Abbildung 7).
Portal- und Knickarmroboter werden auch kombiniert. An einer horizontalen Portalachse wird seitlich oder hängend ein 6-Achs Roboter montiert. Damit erhält man auch unter räumlich begrenzten Bedingungen maximale und flexible Arbeitsräume.
Parallele Kinematiken
Die Arme des Parallelkinematik-Roboters (auch Delta-Roboter oder einfach Parallelroboter) sind auf einer gemeinsamen Grundplatte gelagert. Varianten dieser Kinematik mit 3 bis 6 Achsen sind gängig (Abbildung 8 und Abbildung 9). Er kann entweder an
der Decke hängend oder auf den Boden montiert werden.
Durch die koordinierte Ansteuerung aller Motoren wird eine dreidimensionale Bewegung des Endeffektors erreicht. Werden mehr als 3 unabhängig angetriebene Arme verwendet, lässt sich das Werkzeug auch drehen und/oder kippen.
Parallelkinematik-Roboter kommen zum Einsatz, wenn einfachere Bewegungsabläufe mit hoher Wiederholgenauigkeit und hoher Geschwindigkeit in einem begrenzten Arbeitsraum gefordert sind.
Typische Anwendungen von Delta-Robotern sind schnelle Pick-and-Place-Anwendungen mit teilgeordneten Erzeugnissen auch mit Fließbandverfolgung für Handhabungs-, Montage- und Verpackungsaufgaben (Abbildung 8).
Hexapod-Roboter eignen sich vor allem für Bearbeitungsaufgaben z. B. zum Bohren, Schleifen, Trennen oder für Montageprozesse. Sie zeichnen sich durch eine extreme Steifigkeit bei hoher Wiederholgenauigkeit aus. Der Arbeitsbereich ist sehr begrenzt (Abbildung 9).

