
Abschnitt 5.3 - 5.3 Kraft- und/oder Leistungsbegrenzung
5.3.1 Prinzip
Generell muss sichergestellt sein, dass bei einem Kontakt zwischen Roboter oder Werkzeug und Person bestimmte Belastungskenngrößen nicht überschritten werden.
Verlässliche Grenzwerte für diese medizinischen und biomechanischen Anforderungen waren bei Drucklegung dieser DGUV Information in Vorbereitung. Hinsichtlich aktueller Grenzwerte wenden Sie sich bitte an die Deutsche Gesetzliche Unfallversicherung oder an Ihren zuständigen gesetzlichen Unfallversicherungsträger.
In einer früheren Ausgabe von EN ISO 10218-1 aus dem Jahr 2006 war eine maximale Leistung von 80 W oder eine maximale Kraft von 150 N an der Werkzeugaufnahme angeben. Diese pauschalen Werte wurden in der Folgeausgabe der zuvor genannten Norm wieder gestrichen. Es war festgestellt worden, dass biomechanische Grenzwerte nach Körperregionen differenziert betrachten werden müssen.
Um den Druck auf die Körperregionen zu minimieren, sollten grundsätzlich alle Kanten des Robotersystems einschließlich der Werkzeuge gerundet sein.
Eine Möglichkeit zur Begrenzung der Kontaktkräfte besteht im Aufbringen von Schutzeinrichtungen direkt auf dem Roboter und ggf. auf dem Werkzeug. Hierzu eignen sich insbesondere taktile Schutzeinrichtungen. Sie lösen bei Kontakt mit einer Person einen Stopp aus. Auch eine Kombination von taktilen Schutzeinrichtungen mit kapazitiven oder induktiven Schutzeinrichtungen ist möglich (Abbildung 51).
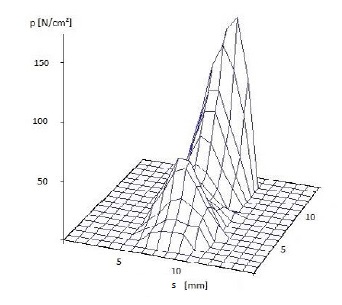
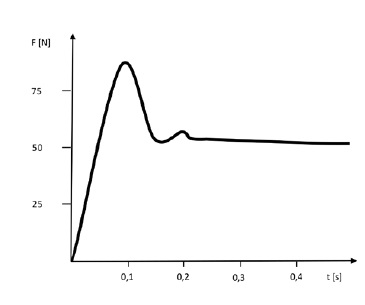
5.3.2 Messung von Kraft und Druck
Im Rahmen der Risikobeurteilung der Applikation ist festzulegen, welche Stellungen des Roboters einschließlich Werkzeug für Messzwecke auszuwählen sind. Für die korrespondierenden Körperregionen sind typischerweise anzunehmen:
Eingreifen der Bedienperson in den Werkzeugbereich
Beobachten des Arbeitsprozesses
Beobachten von Störungen
Anstoßen der Roboterarme an den Körper
Anstoßen des Werkzeugs und des Werkstücks an den Körper
Die Kraft- oder Druckeinwirkung hängt von der Formgebung des Roboters, des Werkzeugs, des Werkstücks und aller sonstigen am Arbeitsprozess beteiligten Vorrichtungen ab (siehe auch EN ISO 10218-2). Große, kantige und schwere Werkstücke sind nach heutigem Stand der Technik für diese Art der Kollaboration nicht geeignet. Allein die Trägheit dieser Werkstücke führt in der Regel zur Überschreitung der Kraft- bzw. Druckgrenzen.


Besonders kritisch ist auch das Ablegen von Teilen in Vorrichtungen. Die Industrie verlangt dabei meist höchste Präzision, so dass z. B. am Greifer gern Zentriervorrichtungen verwendet werden. Die dabei entstehenden Scherkanten sind aufgrund der auftretenden Drücke nicht zu beherrschen. Scherkanten sind grundsätzlich zu vermeiden.
Des Weiteren sind die für den Kollaborationsbetrieb zugelassenen Stellungen des Roboters (Posen) ausschlaggebend. In der Regel müssen mithilfe der Funktion Sichere Position die Verfahrwege des Roboters begrenzt werden, um z. B. sensible Körperteile wie Kopf und Hals vom Arbeitsbereich auszuschließen.
5.3.3 Sicherheitsfunktionen
Die Anforderungen nach EN ISO 10218-1 und
EN ISO 10218-2 gelten auch für kollaborierende Roboter. Neben den darin festgelegten obligatorischen Sicherheitsfunktionen wie Not-Halt, Sicherheitshalt und Zustimmungsschalter muss ein Roboter in der Funktion Leistungs- und Kraftbegrenzung (Power and Force Limiting) in der Regel mindestens über die folgenden zusätzlichen Sicherheitsfunktionen verfügen:
Sichere Überwachung des Drehmoments bzw. der Kraft
Unter Berücksichtigung der Kantengeometrien sämtlicher am Arbeitsprozess beteiligter Oberflächen des Robotersystems resultiert aus der roboterseitigen Überwachung der Kraft bzw. des Drehmoments auch die Überwachung des Drucks im Robotersystem.
Sichere Überwachung der Geschwindigkeit
Um sicherzustellen, dass bei einem eintretenden oder bevorstehenden Kontakt die Geschwindigkeit keine fehlerhaften Werte annimmt, muss, um die beim Kontakt zu gewährleistende Kraft einzuhalten, auch die Geschwindigkeit sicher überwacht werden.
Sichere Überwachung der Position
Um Arbeitsbereiche entsprechend der den Körperregionen zugeordneten Belastungsgrenzen definieren und abgrenzen zu können, muss der Roboter über eine sicher überwachte Position verfügen.
Die Sicherheitsfunktionen müssen Kategorie 3/PLd entsprechen. D. h., die Sicherheitsfunktionen müssen auch unter Fehlerfallbedingungen gegeben sein. Es reicht z. B. nicht aus, die Kraft nur im Normalzustand zu messen und zu dokumentieren. Auch bei Ausfall von Bauteilen, Hard- und Softwarefehlern dürfen keine Kraftüberschreitungen eintreten. Das Gleiche gilt für alle anderen Sicherheitsfunktionen (siehe Abschnitt 4.1.3).
Alternativ kann z. B. eine sichere Kraftbegrenzung auch durch inhärent sichere Konstruktion realisiert werden.