
Abschnitt 2.1 - 2 Rechtsgrundlagen
2.1 Europäische Rechtsvorschriften für Industrieroboter
2.1.1 Europäische Rechtsvorschriften
Die Europäische Union (EU) brachte für die Industrie weitreichende Veränderungen auf dem Vorschriftensektor, sowohl zur sicherheitsgerechten Gestaltung von Maschinen und Anlagen als auch für die Industriebetriebe, welche sie betreiben.
Die nationalen Vorschriften wurden weitgehend durch europaweit geltende Vorschriften abgelöst.
Im Wesentlichen sind das EG-Richtlinien. Alle Mitgliedstaaten der EU sind verpflichtet, die europäischen Vorschriften in ihr nationales Recht zu übernehmen und ihre eigenen Vorschriften in diesem Bereich zurückzuziehen. Dieser Vorgang ist auch unter dem Begriff der Harmonisierung bekannt und diese Maßnahme ist eine der Grundvoraussetzungen für den "Freien Warenverkehr" innerhalb der EU.
Alle Waren/Produkte, die in der EU in Verkehr gebracht werden sollen, müssen also die auf sie zutreffenden EU-Vorschriften erfüllen, ganz gleich, ob sie in der EU hergestellt oder in die EU eingeführt werden.
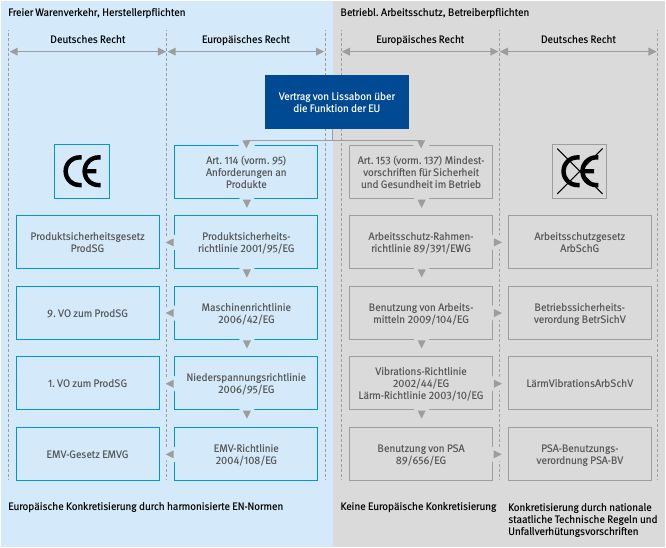
Richtlinien unter Artikel 153 sind Rechtsgrundlage für den betrieblichen Arbeits- und Gesundheitsschutz und legen die Grundpflichten von Arbeitgebern und Arbeitnehmern fest.
Sie enthalten nur Mindestanforderungen, so dass auf nationaler Ebene auch höhere Schutzanforderungen gestellt sein können. Die nationalen Regelungen können von Mitgliedsstaat zu Mitgliedsstaat unterschiedlich sein (Abbildung 15).
Richtlinien unter Artikel 114 des EG-Vertrags schaffen die Grundlagen für den freien Warenverkehr innerhalb der Mitgliedsstaaten, indem sie für Produkte einheitliche grundlegende Sicherheitsanforderungen stellen. In ihrer Umsetzung besteht kein nationaler Spielraum. Äußeres Kennzeichen am Produkt ist das CE-Zeichen ( ).
).
Jede Roboterzelle oder Roboteranlage muss zum Zeitpunkt des Bereitstellens auf dem Markt mit einer EG-Konformitätserklärung und mit einem CE-Zeichen versehen werden.
Die wichtigsten EG-Richtlinien für Industrieroboteranlagen sind:
Maschinenrichtlinie [13]
Niederspannungsrichtlinie [14]
EMV-Richtlinie [15]
Darüber hinaus können Industrieroboteranlagen von weiteren EG-Richtlinien erfasst sein, z. B. Druckgeräterichtlinie oder Druckbehälterrichtlinie [16]. Die zutreffenden EG-Richtlinien müssen in der EG-Konformitätserklärung aufgeführt werden (siehe Abschnitt 3.1).
Die EG-Richtlinien unter Artikel 114 wenden sich an die Hersteller von Produkten und wurden nach dem so genannten neuen Ansatz erstellt. Danach werden in den betreffenden Richtlinien nicht die technischen Anforderungen im Einzelnen niedergelegt. Die Richtlinien nach dem neuen Ansatz enthalten nur die zwingenden und grundlegenden Sicherheits- und Gesundheitsanforderungen.
Die EG-Richtlinien werden durch das deutsche Produktsicherheitsgesetz (ProdSG) in nationales Recht umgesetzt.
Damit die Hersteller die Übereinstimmung mit diesen grundlegenden Anforderungen leichter nachweisen können und damit die Übereinstimmung überprüft werden kann, werden auf Mandat der Europäischen Kommission Normen erarbeitet, "deren Gegenstand die Verhütung von Risiken ist, die sich aus der Konstruktion und dem Bau von Maschinen ergeben können", sogenannte harmonisierte Normen (siehe Abschnitt 2.1.2).
Europäische Normenorganisationen
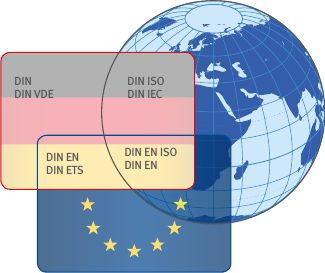
CEN, CENELEC und ETSI sind die drei großen europäischen Normungsorganisationen und alleinig ermächtigt, die unter den EG-Richtlinien mandatierten Normen herauszugeben. Sie haben ihren Sitz in Brüssel. CENELEC ist verantwortlich für die Normung im elektrotechnischen Bereich, ETSI für die Normung im Telekommunikationsbereich und CEN für die Normung in allen übrigen technischen Bereichen.
| CEN | = | Comité Européen de Normalisation; |
|---|---|---|
| CENELEC | = | Comité Européen de Normalisation Électrotechnique |
| ETSI | = | European Telecommunications Standards Institute |
Internationale Normung
ISO, IEC und ITU sind die internationalen Gegenstücke zu den europäischen Normungsorganisationen. Ihr Sitz ist in Genf. IEC ist verantwortlich für die Normung im elektrotechnischen Bereich, ITU für die Normung im Telekommunikationsbereich und ISO für die Normung in allen übrigen technischen Bereichen.
| ISO | = | International Organization for Standardization |
|---|---|---|
| IEC | = | International Electrotechnical Commission |
| ITU | = | International Telecommunication Union |
Zusammenarbeit zwischen europäischer und internationaler Normung
Es existieren Übereinkommen zwischen ISO und CEN (Wiener Vereinbarung) sowie zwischen IEC und CENELEC (Dresdner Vereinbarung), Normungsarbeit möglichst nur noch auf internationaler Ebene durchzuführen. So erarbeitete Normen werden dann ins europäische Normenwerk übernommen. Damit wird erreicht, dass die Anforderungen aus europäischen und aus internationalen Normen übereinstimmen.
2.1.2 Harmonisierte Normen
Harmonisierte Normen sind Normen, die durch die europäischen Normungsorganisationen im Auftrag der Europäischen Kommission erarbeitet werden. Sie konkretisieren die grundsätzlichen Anforderungen der EG-Richtlinien. Im Anhang ZA einer harmonisierten Norm wird angegeben, welche Abschnitte der jeweiligen Norm die wesentlichen Anforderungen der EG-Richtlinie erfüllen.
Im Amtsblatt der EU werden die Fundstellen der harmonisierten Normen neben dem Datum des Beginns der Konformitätsvermutung und gegebenenfalls den Übergangsfristen veröffentlicht. Sobald die Veröffentlichung im Amtsblatt der EU erfolgt ist, gilt die sogenannte Konformitätsvermutung. Das heißt, bei Anwendung der Norm kann davon ausgegangen werden, dass die grundlegenden Anforderungen der betreffenden Richtlinie erfüllt werden. Trotz des daraus resultierenden hohen Stellenwerts harmonisierter Normen bleibt deren Anwendung freiwillig. Wendet der Hersteller von Maschinen harmonisierte Normen nicht oder nur teilweise an, muss er in den Technischen Unterlagen neben der Risikobeurteilung die Schritte angeben, die zur Einhaltung der grundlegenden Sicherheits- und Gesundheitsschutzanforderungen eingeleitet wurden.
Harmonisierte Normen müssen auch in nationale Normen umgesetzt werden. Dafür ist in Deutschland das Deutsche Institut für Normung (DIN) zuständig. Die Fundstellen dieser Normen werden dann im "Gemeinsamen Ministerialblatt" veröffentlicht.
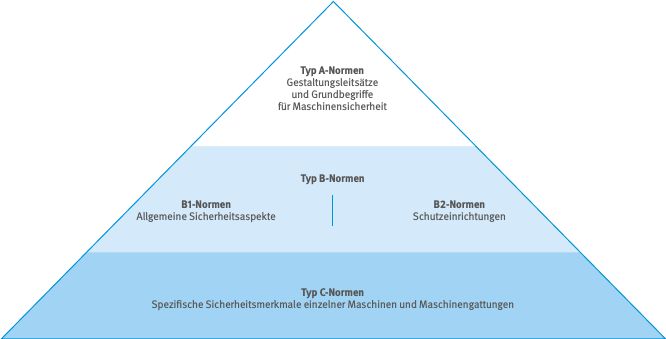
A-Normen werden als Grundnormen bezeichnet, da sie sich grundlegend mit Gefährdungen und Risiken befassen (Katalog aller bekannten Gefährdungen) und vorgeben, wie Gefährdungsanalysen und Risikobeurteilungen zu erstellen sind. Derzeit existiert nur eine A-Norm: EN ISO 12100.
B-Normen werden auch als Gruppennormen bezeichnet, welche als Typ B1-Normen Sicherheitsaspekte diskutieren, wie z. B. Körpergrößen und Bewegungsgeschwindigkeiten des Menschen, seine Empfindsamkeit hinsichtlich berührbarer Oberflächentemperaturen usw.
Als Typ B2-Normen behandeln sie verwendbare Schutzeinrichtungen, z. B. Zweihandschaltungen, Lichtschranken, Lichtgitter, Lichtvorhänge, Laserscanner, Schaltplatten, Schaltmatten, trennende Schutzeinrichtungen (z. B. Umzäunungen, überwachte Zugangstüren in Umzäunungen) sowie NOT-HALT-Einrichtungen.
C-Normen sind Europäische Produktnormen, welche einen Maschinentyp sicherheitstechnisch vollständig beschreiben, wie z. B. Industrieroboter, Pressen, Werkzeugmaschinen usw.
Wenn eine Typ-C-Norm von einer oder mehreren Festlegungen abweicht, die in einer Typ-A-Norm oder einer Typ-B-Norm behandelt werden, haben die Festlegungen der Typ-C-Norm Vorrang.
C-Norm für Industrieroboter
Für Industrieroboter steht eine zweiteilige C-Norm zur Verfügung: die EN ISO 10218-1 und -2: Industrieroboter - Sicherheitsanforderungen - Teil 1 Roboter und Teil 2 Robotersysteme und Integration.
EN ISO 10218-1
Die EN ISO 10218-1 gilt für Industrieroboter, d. h. automatisch gesteuerte, frei programmierbare Mehrzweck-Manipulatoren, die in drei oder mehr Achsen programmierbar sind und zur Verwendung in der Automatisierungstechnik entweder an einem festen Ort oder beweglich angeordnet sein können [5]. Die Norm stellt Anforderungen und gibt Anleitung für inhärent sichere Konstruktion, Schutzmaßnahmen und die Benutzerinformation. Sie beschreibt grundlegende Gefährdungen durch Roboter und die Beseitigung oder hinreichende Verringerung der damit verbundenen Risiken. Sie gilt nicht für Roboter außerhalb des industriellen Bereichs, kann aber darauf angewendet werden (wenn keine anderen spezifischen Normen vorliegen).
EN ISO 10218-2
Dieser Teil der ISO 10218 gibt eine Anleitung, wie die Sicherheit bei der Integration und dem Einbau von Robotern sichergestellt werden kann [6]. Er versteht sich ergänzend und zusätzlich zur ISO 10218-1.
Die Norm leitet dazu an, die besonderen Gefährdungen, die mit der Integration, dem Einbau und den Anforderungen an die Verwendung von Industrierobotern einhergehen, zu identifizieren und auf diese einzugehen. Die Norm beinhaltet die Schutzmaßnahmen für die Roboterintegration einschließlich der Risiken, die aus Applikation, Werkzeug und Werkstück resultieren.